大阪大学原田研介教授开发出一套系统,可以让机器在每一次作业中正确判定抓取的位置。机器抓取零件时,摄像机会测量真实的抓取位置以及其目标位置之间的误差,此误差会反映在下一个位置的判定上。经过数次确认后就能补正误差。
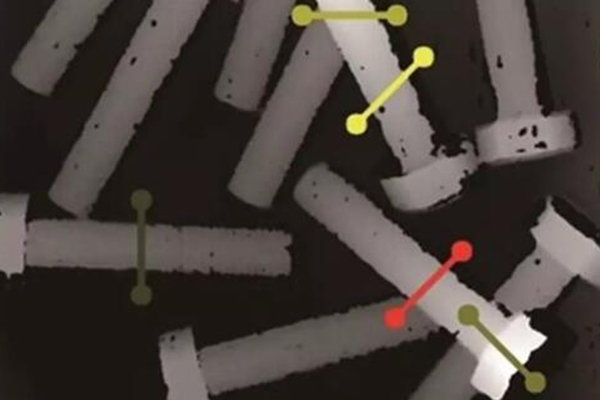
误差的补正只要透过简单的行列式函数就能完成,因此负担很小。机械抓取并放置零件时,只需给摄像机看一次并量测就好了。教授在实验室对紧固件的抓取作业起初设定10mm的误差,经过数次确认后将误差缩小到5mm以下。此系统很单纯,不需增加设备,因此很容易导入。
 1184次
1184次
发布日期:2019年09月10日

扫描二维码进入
微信H5资讯


扫描二维码进入
资讯小程序
大阪大学原田研介教授开发出一套系统,可以让机器在每一次作业中正确判定抓取的位置。机器抓取零件时,摄像机会测量真实的抓取位置以及其目标位置之间的误差,此误差会反映在下一个位置的判定上。经过数次确认后就能补正误差。
误差的补正只要透过简单的行列式函数就能完成,因此负担很小。机械抓取并放置零件时,只需给摄像机看一次并量测就好了。教授在实验室对紧固件的抓取作业起初设定10mm的误差,经过数次确认后将误差缩小到5mm以下。此系统很单纯,不需增加设备,因此很容易导入。
 点赞
点赞
本网站有部分文章是由网友自由上传,对于这些文章,本站仅提供交流平台,不为其版权负责。
如果您发现本网站上有侵犯您的知识产权的文章,请发信至114@luosi.com或直接在线联系华网客服
本站原创文章,如需转载,请先取得编辑授权或本站的书面授权,并注明来源华人螺丝网。